
Как определить обороты ротора по обмотке статора
Открываем одну из двух крышек электродвигателя и смотрим на катушки обмотки, вернее, на одну катушку. Она может состоять из нескольких секций (2-х, 3-х, 4-х).
В статоре находим катушку, которая нам лучше всего видна. Теперь смотрим на её размер, относительно железа статора. Я не буду рассказывать, как катушки соединены между собой, как соединены секции в катушке, через сколько пазов в статоре они закладываются и т.д. Это нам сейчас не нужно. Нам сейчас нужно определить расстояние, которое занимает одна катушка по кольцу железа статора.

Определив это расстояние (даже на глаз), мы может с уверенностью сказать сколько оборотов имеет данный асинхронный электродвигатель.
1.
Если катушка занимает половину кольца железа статора, то электродвигатель на 3000 об/мин.
При поступлении в ремонт электродвигателя с отсутствующей табличкой, приходиться определять мощность и обороты по статорной обмотке. В первую очередь нужно определить обороты электродвигателя. Самый простой способ для определения оборотов в однослойной обмотке это посчитать количество катушек (катушечных групп).
| Количество катушек (катушечных групп) в обмотке шт. | Частота вращения об/мин. При частоте питающей сети f=50Гц. | ||
| Трёхфазные | Однофазные в рабочей обмотке | ||
| Односл. | Двухсл. | ||
| 6 | 6 | 2 | 3000 |
| 6 | 12 | 4 | 1500 |
| 9 | 18 | 6 | 1000 |
| 12 | 24 | 8 | 750 |
| 15 | 30 | 10 | 600 |
| 18 | 36 | 12 | 500 |
| 21 | 42 | 14 | 428 |
| 24 | 48 | 16 | 375 |
| 27 | 54 | 18 | 333 |
| 30 | 60 | 20 | 300 |
| 36 | 72 | 24 | 250 |
По таблице у однослойных обмоток на 3000 и 1500 об/мин. одинаковое количество катушек по 6, визуально отличить их можно по шагу. Если от одной стороны катушки к другой стороне провести линию, и линия будет проходить через центр статора, то это обмотка 3000 об/мин. рисунок №1. У электродвигателей на 1500 оборотов шаг меньше.
| 2p | 2 | 4 | 6 | 8 | 10 | 12 |
| об/ мин f=50Гц | 3000 | 1500 | 1000 | 750 | 600 | 500 |
| 2p | 14 | 16 | 18 | 20 | 22 | 24 |
| об/ мин f=50Гц | 428 | 375 | 333 | 300 | 272 | 250 |
| 2p | 26 | 28 | 30 | 32 | 34 | 36 |
| об/ мин f=50Гц | 230 | 214 | 200 | 187,5 | 176,4 | 166,6 |
| 2p | 38 | 40 | 42 | 44 | 46 | 48 |
| об/ мин f=50Гц | 157,8 | 150 | 142,8 | 136,3 | 130,4 | 125 |
Что такое шпиндель
Винчестер представляет собой набор из одной или нескольких герметизированных пластин в форме дисков, покрытых слоем ферромагнитного материала и считывающих головок в одном корпусе. Пластины приводятся в движение при помощи шпинделя (вращающегося вала). Пластины жесткого диска закреплены на шпинделе на строго определенном расстоянии. При вращении пластин расстояние должно быть таким, чтобы считывающие головки могли читать и записывать на диск, но при этом не касались поверхности пластин.
Двигатель шпинделя должен обеспечивать стабильное вращение магнитных пластин на протяжении тысяч часов, чтобы диск нормально функционировал. Неудивительно, что иногда проблемы с диском связаны с заклиниванием шпинделя, и вовсе не являются ошибками в файловой системе.
Двигатель отвечает за вращение пластин, и это позволяет работать жесткому диску. Благодаря отсутствию контакта, жесткий диск можно перезаписать в среднем 100 тысяч раз. Также на продолжительность работы диска влияет герметический корпус (гермозона), благодаря которому внутри корпуса HDD создается пространство, очищенное от пыли и влаги.
Вот как выглядят шпиндели, у каждого производителя они немного внешне могут отличаться. Это вот шпиндели от винтов Samsung.

или вот еще подборочка.

spindle speed или по русски скорость вращения шпинделя, определяет насколько быстро вращаются пластины в нормальном режиме работы жесткого диска. Она измеряется в RpM, то есть оборотах в минуту. От RpM скорости, будет зависеть на сколько быстро будет работать ваш компьютер, а именно как быстро компьютер может получить данные от жесткого диска.
Сколько раз я видел тормозные ноутбуки, в которых было по 4 ГБ оперативной памяти, там стоял процессор Intel core i3 или даже i5, но стоял блин hdd со скоростью вращения 5400 оборотов в минуту, и это был полный трешь, такие винты нужно сразу вытаскивать и ставить ssd иначе работать было не возможно
Время, которое требуется для блока магнитных головок, чтобы перейти к запрошенной дорожке/цилиндру называется время поиска (seek latency или задержкой). После того как считывающие головки переместятся в нужную дорожку/цилиндр, мы должны дождаться поворота пластин, чтобы нужный сектор оказался под головкой — это задержки на вращение (rotational latency time). И это является прямой функцией скорости шпинделя. То есть, чем быстрее скорость шпинделя, тем меньше задержки на вращение.
Видео
Источник
В данной статье осветим тему механических и электрических характеристик электродвигателей. На примере асинхронного двигателя рассмотрим такие параметры как мощность, работа, КПД, косинус фи, вращающий момент, угловая скорость, линейная скорость и частота. Все эти характеристики оказываются важными при проектировании оборудования, в котором электродвигатели служат в качестве приводных.
Механические характеристики электродвигателя представляют собой зависимость угловой скорости ω от развиваемого им момента на валу, т.е. ω = f (M). Различают естественные и искусственные механические характеристики электродвигателя.
Естественная механическая характеристика соответствует работе электродвигателя с номинальными параметрами при нормальной схеме включения. Искусственная механическая характеристика соответствует работе электродвигателя с параметрами, отличающимися от номинальных, например, при введении сопротивления, изменении питающего напряжения, частоты и др.

Сегодня особенно широко распространены в промышленности именно асинхронные электродвигатели, поэтому на их характеристиках и остановимся.

Естественная механическая характеристика асинхронного двигателя
Для примера рассмотрим АИР80В2У3.

Номинальная механическая мощность асинхронного электродвигателя
На шильдике (на паспортной табличке) электродвигателя указывается всегда номинальная механическая мощность на валу данного двигателя. Это не та электрическая мощность, которую данный электродвигатель потребляет из сети.
Так, например, для двигателя АИР80В2У3, номинал в 2200 ватт соответствует именно механической мощности на валу. То есть в оптимальном рабочем режиме данный двигатель способен выполнять механическую работу 2200 джоулей каждую секунду. Обозначим эту мощность как P1 = 2200 Вт.

Номинальная активная электрическая мощность асинхронного электродвигателя
Чтобы определить номинальную активную электрическую мощность асинхронного электродвигателя, опираясь на данные с шильдика, необходимо принять в расчет КПД. Так, для данного электродвигателя КПД составляет 83%.

Что это значит? Это значит, что только часть активной мощности, подаваемой из сети на обмотки статора двигателя, и безвозвратно потребляемой двигателем, преобразуется в механическую мощность на валу. Активная мощность равна P = P1/КПД. Для нашего примера, по представленному шильдику видим, что P1 = 2200, КПД = 83%. Значит P = 2200/0,83 = 2650 Вт.
Номинальная полная электрическая мощность асинхронного электродвигателя
Полная электрическая мощность, подаваемая на статор электродвигателя от сети всегда больше механической мощности на валу и больше активной мощности, безвозвратно потребляемой электродвигателем.

Для нахождения полной мощности достаточно активную мощность разделить на косинус фи. Таким образом, полная мощность S = P/Cosφ. Для нашего примера P = 2650 Вт, Cosφ = 0,87. Следовательно полная мощность S = 2650/0,87 = 3046 ВА.
Номинальная реактивная электрическая мощность асинхронного электродвигателя
Часть полной мощности, подаваемой на обмотки статора асинхронного электродвигателя, возвращается в сеть. Это реактивная мощность Q.
Реактивная мощность связана с полной мощностью через sinφ, и связана с активной и с полной мощностью через квадратный корень. Для нашего примера:
Реактивная мощность Q измеряется в ВАР — в вольт-амперах реактивных.
Теперь давайте рассмотрим механические характеристики нашего асинхронного двигателя: номинальный рабочий момент на валу, угловую скорость, линейную скорость, частоту вращения ротора и ее связь с частотой питания электродвигателя.
Частота вращения ротора асинхронного электродвигателя
На шильдике мы видим, что при питании переменным током частотой в 50 Гц, ротор двигателя совершает при номинальной нагрузке 2870 оборотов в минуту, обозначим эту частоту как n1.
Эпилог
При всех своих достоинствах асинхронные машины имеют существенный недостаток, это рывок ротора при подаче напряжения. Такие режимы опасны как для самого двигателя, так и для приводных механизмов. Поскольку во время пуска АД, ток в обмотках двигателя приравнивается к короткому замыканию. А рывок вала разбивает подшипники, шлицы, передаточные устройства. Поэтому пуск АД стараются производить плавным стартом. А именно:










- Запуск через ЛАТР.
- Разгон и работа АД, через переключение обмоток двигателя звезда-треугольник.
- Использование устройств управления, таких как частотный преобразователь.
Источник
Угловая скорость в спорте
Угловая скорость часто используется в спорте. Например, спортсмены уменьшают или увеличивают угловую скорость движения клюшки для гольфа, биты или ракетки, чтобы улучшить результаты. Угловая скорость связана с линейной скоростью так, что из всех точек на отрезке, вращающемся вокруг точки на этом отрезке, то есть вокруг центра вращения, самая отдаленная точка от этого центра движется с самой высокой линейной скоростью. Так, например, если клюшка для гольфа вращается, то конец этой клюшки, больше всего удаленный от центра вращения двигается с самой высокой линейной скоростью. В то же время все точки на этом отрезке движутся с одинаковой угловой скоростью. Поэтому удлиняя клюшку, биту, или ракетку, спортсмен также увеличивает линейную скорость, а соответственно скорость удара, передающуюся мячу, так что он может пролететь на большее расстояние. Укорачивая ракетку или клюшку, даже перехватив ее ниже, чем обычно, наоборот замедляют скорость удара.
При первобытнообщинном строе главными охотниками были мужчины
У высоких людей с длинными конечностями есть преимущество в отношении линейной скорости. То есть, передвигая ноги с одинаковой угловой скоростью, они двигают ступни с более высокой линейной скоростью. То же происходит и с их руками. Такое преимущество может быть одной из причин того, что в первобытных обществах мужчины занимались охотой чаще, чем женщины. Вероятно, что из-за этого также в процессе эволюции выиграли более высокие люди. Длинные конечности помогали не только в беге, но и во время охоты — длинные руки бросали копья и камни с большей линейной скоростью. С другой стороны, длинные руки и ноги могут быть неудобством. Длинные конечности имеют больший вес и для их перемещения нужна дополнительная энергия. Кроме этого, когда человек быстро бежит, длинные ноги быстрее двигаются, а значит, при столкновении с препятствием удар будет сильнее, чем у людей с короткими ногами, которые двигаются с той же линейной скоростью.
В гимнастике, фигурном катании и нырянии также используют угловую скорость. Если спортсмен знает угловую скорость, то легко вычислить количество переворотов и других акробатических трюков во время прыжка. Во время кувырков спортсмены обычно прижимают ноги и руки как можно ближе к корпусу, чтобы уменьшить инерцию и увеличить ускорение, а значит и угловую скорость. С другой стороны, во время ныряния или приземления, судьи смотрят, как ровно спортсмен приземлился. На высокой скорости трудно регулировать направление полета, поэтому спортсмены специально замедляют угловую скорость, немного вытягивая от корпуса руки и ноги.
Спортсмены, которые занимаются метанием диска или молота, тоже контролируют линейную скорость с помощью угловой. Если просто бросить молот, не вращая его по кругу на длинной стальной проволоке, увеличивающей линейную скорость, то бросок будет не таким сильным, поэтому молот сначала раскручивают. Олимпийские спортсмены поворачиваются вокруг своей оси от трех до четырех раз, чтобы увеличить угловую скорость до максимально возможной.
Как изготовить своими руками?
Существуют различные варианты схем регулировки. Приведём один из них более подробно.
Вот схема его работы:

Первоначально, это устройство было разработана для регулировки коллекторного двигателя на электротранспорте. Речь шла о таком, где напряжение питания составляет 24 В, но эта конструкция применима и для других двигателей.
Слабым местом схемы, которое было определено при испытаниях её работы, является плохая пригодность при очень больших значениях силы тока. Это связано с некоторым замедлением работы транзисторных элементов схемы.
Рекомендуется, чтобы ток составлял не более 70 А. В этой схеме нет защиты по току и по температуре, поэтому рекомендуется встроить амперметр и контролировать силу тока визуально. Частота коммутации составит 5 кГц, она определяется конденсатором C2 ёмкостью 20 нф.
При этом, рекомендуется подобрать величину R1 таким образом, чтобы правильно настроить работу регулятора. С выхода микросхемы, управляющий импульс поступает на двухтактный усилитель на транзисторах КТ815 и КТ816, далее идёт уже на транзисторы.
Печатная плата имеет размер 50 на 50 мм и изготавливается из одностороннего стеклотекстолита:

На этой схеме дополнительно указаны 2 резистора по 45 ом. Это сделано для возможного подключения обычного компьютерного вентилятора для охлаждения прибора. При использовании в качестве нагрузки электродвигателя, необходимо схему заблокировать блокирующим (демпферным) диодом, который по своим характеристикам соответствует удвоенному значению тока нагрузки и удвоенному значению питающего напряжения.
Работа устройства при отсутствии такого диода может привести к поломке вследствие возможного перегрева. При этом, диод нужно будет поместить на теплоотвод. Для этого, можно воспользоваться металлической пластиной, которая имеет площадь 30 см2.
Регулирующие ключи работают так, что потери мощности на них достаточно малы. В оригинальной схеме, был использован стандартный компьютерный вентилятор. Для его подключения использовалось ограничительное сопротивление 100 Ом и напряжение питания 24 В.
Собранное устройство выглядит следующим образом:

При изготовлении силового блока (на нижнем рисунке), провода должны быть присоединены таким образом, чтобы было минимум изгибов тех проводников по которым проходят большие токи.Мы видим, что изготовление такого прибора требует определённых профессиональных знаний и навыков. Возможно, в некоторых случаях имеет смысл воспользоваться покупным устройством.
Как подключить частотный преобразователь
Если кабель для подключения на 220 В с 1-й фазой, применяется схема «треугольника». Нельзя подключать частотник, если выходной ток выше 50% от номинального значения.
Если кабель питания на три фазы 380 В, то делается схема «звезды». Чтобы проще было подключать питание, предусмотрены контакты и клеммы с буквенными обозначениями.
- Контакты R, S, T предназначены для подключения сети питания по фазам.
- Клеммы U , V , W служат соединением электродвигателя. Для реверса достаточно изменить подключение двух проводов между собой.
В приборе должна быть колодка с клеммой подключения к земле. Подробней, как подключить, здесь.
Определение частот вращения и вращающих моментов на валах.
Определение частот вращения на валах.
Определяем общее передаточное число привода:
где

Тогда
Так как
к.п.
Тогда передаточное число зубчатой передачи uр.п.=2,303
Частоты вращения на валах имеют следующие значения:

Определение вращающих моментов на валах.
Определим момент на валу электродвигателя:

Момент за ременной передачей будет составлять:

Тогда момент на валу за конической передачей будет равна:

Расчет конической передачи
Выбор материала.
По рекомендации произведем выбор для конической передачи материал и вид термической обработки (таблица 2.1 методических указаний).










Второй вариант– колесо – сталь 40Х; твердость поверхности зубьев 269…302НВ; шестерня – сталь 40Х; твердость поверхности зубьев после закалки ТВЧ 45…50 HRC.
Определим среднюю твердость поверхностей зубьев колес и базовые числа нагружений.


По таблице перевода получаем: HBcp=450
При расчете на изгиб базовое число нагружений принимаем:
Определим действительные числа циклов перемены напряжений:
Рассчитаем время работы передачи:

Общее число циклов перемены напряжения:


Так как N ³ NHO то KHL = 1,0
Определение допускаемых напряжений.
Допускаемое контактное и изгибающее напряжение напряжение.


Допускаемые контактные и изгибающие напряжение получаются умножением
HLFL
Для второго варианта термообработки допускаемое контактное напряжение, которое должно определятся в расчете:
Проектный расчет.
Предварительно найдем следующие коэффициенты:
uн = 0,85. Для режима термообработки II коэффициент KHB = 1
1. Диаметр внешней делительной окружности:

2. Угол делительных конусов колеса и шестерни (2.34):
d2 = arctgu = arctg4 = 75,964°; sind2 = cos d1 =0,97;
Конусное расстояние (2.35)

b= 0,285 × Re = 0,285×241,768=68,9» 70 мм.
3. Модуль передачи. Коэффициент KFb = 1, так как колеса полностью прирабатываются (II вариант термообработки). Для прямозубых колес коэффициент uF.=0,85. Допускаемое напряжение изгиба для колеса F =294 Н/мм 2 (оно меньше, чем для шестерни). После подстановки в формулу (2.37) получаем

Примем модуль me =3 мм.
4. Число зубьев колеса (2.38)
Число зубьев шестерни (2.39)
Округляя, примем z1 = 39.
5. Фактическое передаточное число
Отклонение от заданного передаточного числа (2.40)

6. Окончательные размеры колес.










Углы делительных конусов колеса и шестерни:
Делительные диаметры колес (2.41):

Внешние диаметры колес (2.43):


7. Пригодность заготовок колес:

Условия пригодности заготовок выполняются (см, табл. 2.1).
8. Силы в зацеплении.
Средний диаметр колеса
Окружная сила на среднем диаметре колеса (2.45)

Осевая сила на шестерне, равная радиальной силе на колесе (2.46),

Радиальная сила на шестерне, равная осевой силе на колесе (2.47),

9. Проверка зубьев колес по напряжениям изгиба.
Предварительно определим значение некоторых коэффициентов.
Коэффициент
Коэффициент КFV для прямозубых колес при твердости зубьев колеса


Напряжения изгиба в зубьях шестерни (2.51)

Напряжения изгиба зубьев колеса и шестерни меньше допускаемых. Продолжим расчет.
10. Проверка зубьев колес по контактным напряжениям.
Коэффициенты
По формуле (2.52) расчетное контактное напряжение

что меньше допускаемого значения.
На этом силовой расчет конической передачи заканчивается.
Для построения компоновочной схемы нужно дополнительно определить некоторые размеры валов. Для вала
колеса (3.1)
Так как опорами вала конического колеса должны быть конические роликовые подшипники, то коэффициент перед корнем следует принять равным 6. Тогда диаметр вала
Найдем диаметр dп: dп= d + 2×tцил=71+2×5,1=81,2 мм Выбираем dп= 85 мм
Произведем расчет диаметра буртика dБП= dп + 3×r=85+3×3,5=95,5 мм
Округляем до dK=96 мм
Для вала шестерни (3.4)

Примем стандартное значение d=60 мм;
Принимаем стандартное значение d2=65:
БПп
Размеры других участков валов.
Вала колеса с цилиндрическим концом:
Длина посадочного конца вала lМТ=1,5×d=1,5×71=106,5 мм.
длина промежуточного участка lКТ=1,2×dП=1,2×85=102 мм;
длина ступицы колеса lст= 1,2×dK = 1,2×96 ==115,2 мм.
Примем стандартное значение lст= 120 мм.
Вала конической шестерни с коническим концом:
Длина посадочного конца вала lМБ=1,5×d=1,5×60=90 мм.
длина цилиндрического участка 0,15×d = 0,15×60 ==9 мм
длина резьбового участка 0,4×dП=0,4×65= 26 мм.
диаметр и длина резьбы dР=0,9×(d-0,1×lMБ)= 0,9×(60-0,1×90)=45,9 мм. Принимаем 48 мм
Другие размеры обоих валов выявляются при вычерчивании компоновочной схемы.
Угловая скорость
Когда тело движется по окружности, то не все его точки движутся с одинаковой скоростью относительно оси вращения. Если взять лопасти обычного бытового вентилятора, которые вращаются вокруг вала, то точка расположенная ближе к валу имеет скорость вращения больше, чем отмеченная точка на краю лопасти. Это значит, у них разная линейная скорость вращения. В то же время угловая скорость у всех точек одинаковая.










Угловая скорость представляет собой изменение угла в единицу времени, а не расстояния. Обозначается буквой греческого алфавита – ω и имеет единицу измерения радиан в секунду (рад/с). Иными словами, угловая скорость – это вектор, привязанный к оси обращения предмета.
Формула для вычисления отношения между углом поворота и временным интервалом выглядит так:
ω = ∆ϕ/∆t,
где:
- ω – угловая скорость (рад./с);
- ∆ϕ – изменение угла отклонения при повороте (рад.);
- ∆t – время, затраченное на отклонение (с).
Обозначение угловой скорости употребляется при изучении законов вращения. Оно употребляется при описании движения всех вращающихся тел.

Формула угловой скорости
Угловая скорость в конкретных случаях
На практике редко работают с величинами угловой скорости. Она нужна при конструкторских разработках вращающихся механизмов: редукторов, коробок передач и прочего.
Вычислить её, применяя формулу, можно. Для этого используют связь угловой скорости и частоты вращения.
ω = 2*π / Т = 2*π*ν,
где:
- π – число, равное 3,14;
- ν – частота вращения, (об./мин.).
В качестве примера могут быть рассмотрены угловая скорость и частота вращения колёсного диска при движении мотоблока. Часто необходимо уменьшить или увеличить скорость механизма. Для этого применяют устройство в виде редуктора, при помощи которого понижают скорость вращения колёс. При максимальной скорости движения 10 км/ч колесо делает около 60 об./мин. После перевода минут в секунды это значение равно 1 об./с. После подстановки данных в формулу получится результат:
ω = 2*π*ν = 2*3,14*1 = 6,28 рад./с.
К сведению. Снижение угловой скорости часто требуется для того, чтобы увеличить крутящий момент или тяговое усилие механизмов.

Шестерёнчатый уменьшитель хода для мотокультиватора
Как определить угловую скорость
Принцип определения угловой скорости зависит от того, как происходит движение по окружности. Если равномерно, то употребляется формула:
ω = 2*π*ν.
Если нет, то придётся высчитывать значения мгновенной или средней угловой скорости.
Величина, о которой идёт разговор, векторная, и при определении её направления используют правило Максвелла. В просторечии – правило буравчика. Вектор скорости имеет одинаковое направление с поступательным перемещением винта, имеющего правую резьбу.

Правило Максвелла для угловой скорости
Рассмотрим на примере, как определить угловую скорость, зная, что угол поворота диска радиусом 0,5 м меняется по закону ϕ = 6*t:
ω = ϕ / t = 6 * t / t = 6 с-1
Вектор ω меняется из-за поворота в пространстве оси вращения и при изменении значения модуля угловой скорости.
Классификация электродвигателей
- Универсальный
- Репульсионный
КДПТ с обмоткой возбуждения Включение обмотки
Независимое
Последовательное возбуждения
Параллельное
Комбинированное
- КДПТ с постоянными магнитами
- БДПТ (Бесколлекторный двигатель + ЭП |+ ДПР)
- ВРД (Реактивный двигатель с ротором с явновыраженными полюсами и сосредоточенной обмоткой статора + ЭП |+ ДПР)
- Трехфазный (многофазный) АДКР
- АДФР
Двухфазный (конденсаторный)
Однофазный
- с пусковой обмоткой
с экранированными полюсами
с асимметричным магнитопроводом
- СДОВ
- СДПМ СДПМВ
- СДПМП
- Гибридный
СРД
Гистерезисный
Индукторный
Гибридный СРД-ПМ
Реактивно-гистерезисный
Шаговый 5
- Указанная категория не представляет отдельный класс электродвигателей, так как устройства, входящие в рассматриваемую категорию (БДПТ, ВРД), являются комбинацией бесколлекторного двигателя, электрического преобразователя (инвертора) и, в некоторых случаях, — датчика положения ротора. В данных устройствах электрический преобразователь, в виду его невысокой сложности и небольших габаритов, обычно интегрирован в электродвигатель.
- Вентильный двигатель может быть определен как электрический двигатель, имеющий датчик положения ротора, управляющий полупроводниковым преобразователем, осуществляющим согласованную коммутацию обмотки якоря .
- Вентильный электродвигатель постоянного тока — электродвигатель постоянного тока, вентильное коммутирующее устройство которого представляет собой инвертор, управляемый либо по положению ротора, либо по фазе напряжения на обмотки якоря, либо по положению магнитного поля .
- Электродвигатели используемые в БДПТ и ВРД являются двигателями переменного тока, при этом за счет наличия в данных устройствах электрического преобразователя они подключаются к сети постоянного тока.
- Шаговый двигатель не является отдельным классом двигателя. Конструктивно он представляет из себя СДПМ, СРД или гибридный СРД-ПМ.
- КДПТ — коллекторный двигатель постоянного тока
- БДПТ — бесколлекторный двигатель постоянного тока
- ЭП — электрический преобразователь
- ДПР — датчик положения ротора
- ВРД — вентильный реактивный двигатель
- АДКР — асинхронный двигатель с короткозамкнутым ротором
- АДФР — асинхронный двигатель с фазным ротором
- СДОВ — синхронный двигатель с обмоткой возбуждения
Подключение к цепи индуктивной катушки
Частота тока
Включение в ёмкостную цепь катушки индуктивности сразу превращает её в КК. В зависимости от схемы подключения, различают два вида КК 1 класса: параллельный и последовательный.
Параллельный КК
В данной схеме конденсатор С соединён с катушкой L параллельно. Если заряженный конденсатор присоединить к катушке, то энергия, запасённая в нём, передастся ей. Через индуктивную катушку L потечёт ток, вызывая электродвижущую силу (ЭДС).
ЭДС самоиндукции L будет направлена на снижение тока в параллельной цепи. Ток, созданный этой ЭДС, и ток разряда ёмкости сначала одинаковы, а их суммарное значение равно нулю. Конденсатор передаст свою энергию Ec в катушку и полностью разрядится. Индуктивность, получив максимальную магнитную энергию EL, начнёт заряжать ёмкость напряжением уже другой полярности. Когда вся энергия из индуктивности перейдёт в ёмкость, конденсатор будет полностью заряжен. В цепи появляются колебания, такой контур называется колебательным.
Параллельный КК
К сведению. Если бы в такой цепи отсутствовали потери, то такие колебания никогда не стали затухать. На практике, продолжительность процесса зависит от потери энергии. Чем больше потери, тем меньше длительность колебаний.
Параллельное соединение C и L вызывает резонанс токов. Это значит, что токи, проходящие через C и L, выше по значению, чем ток через сам контур, в конкретное число раз. Это число носит название добротности Q. Оба тока (емкостной и индуктивный) остаются внутри цепи, потому что они находятся в противофазе, и происходит их обоюдная компенсация.
Последовательный КК
В этой схеме соединены последовательно друг с другом катушка и конденсатор.
Последовательный КК
В такой схеме происходит resonance напряжений, R контура устремляется к нулю в случае образования резонансной частоты (fрез). Это позволяет использовать подобную систему резонанса в качестве фильтра.
Типы нагрузок электродвигателей
Существует четыре типа нагрузок электродвигателей промышленной автоматики:
- переменная мощность и постоянный крутящий момент;
- переменный крутящий момент и постоянная мощность;
- переменные мощность и крутящий момент;
- управление положением ротора или регулирование крутящего момента.
К изделиям с переменной мощностью и постоянным крутящим моментом относятся транспортеры, краны и редукторные насосы. Крутящий момент у них постоянен, так как нагрузка не меняется. Требующаяся мощность может различаться в зависимости от типа изделия, поэтому хорошим выбором в этом случае будут электродвигатели постоянного тока с постоянной частотой вращения ротора.
Пример изделия с переменным крутящим моментом и постоянной мощностью — станок для перемотки бумаги. Скорость подачи материала постоянна, поэтому мощность не меняется. Нагрузка, однако, меняется по мере увеличения диаметра рулона. Для небольших систем такого рода хорошо подойдут электродвигатели постоянного тока или серводвигатели. Другой важный фактор в этом случае — энергия рекуперации, которую следует учитывать при выборе размера электродвигателя или метода регулирования мощности. В более крупных системах, возможно, целесообразнее будет использовать электродвигатели переменного тока с датчиками перемещений, регулирование с обратной связью и приводы, работающие в четырех квадрантах.
Для вентиляторов, центробежных насосов и мешалок требуются переменные мощность и крутящий момент. С увеличением частоты вращения ротора электродвигателя растет и мощность на нагрузке, а с нею требующиеся номинальная мощность и крутящий момент. При нагрузках такого типа начинает играть важную роль КПД двигателя. В подобных изделиях применяются электродвигатели переменного тока с инверторным управлением и частотно-регулируемые приводы.
В линейных приводах, которые должны обеспечивать точное перемещение во множество положений, требуется управление положением или регулирование крутящего момента ротора с малой погрешностью, а зачастую и обратная связь для проверки правильности положения. Для этих целей лучше всего подходят серводвигатели и шаговые двигатели, но наряду с ними часто применяются электродвигатели постоянного тока с обратной связью или электродвигатели переменного тока с инверторным управлением и датчиком перемещения, которые позволяют с малой погрешностью регулировать крутящий момент на металлургических и бумагоделательных линиях, а также в других аналогичных применениях.
Угол поворота и период обращения
Рассмотрим точку А на предмете, вращающимся вокруг своей оси. При обращении за какой-то период времени она изменит своё положение на линии окружности на определённый угол. Это угол поворота. Он измеряется в радианах, потому что за единицу берётся отрезок окружности, равный радиусу. Ещё одна величина измерения угла поворота – градус.
Когда в результате поворота точка А вернётся на своё прежнее место, значит, она совершила полный оборот. Если её движение повторится n-раз, то говорят о некотором количестве оборотов. Исходя из этого, можно рассматривать 1/2, 1/4 оборота и так далее. Яркий практический пример этому – путь, который проделывает фреза при фрезеровании детали, закреплённой в центре шпинделя станка.










Внимание! Угол поворота имеет направление. Оно отрицательное, когда вращение происходит по часовой стрелке и положительное при вращении против движения стрелки. Если тело равномерно продвигается по окружности, можно говорить о постоянной угловой скорости при перемещении, ω = const
Если тело равномерно продвигается по окружности, можно говорить о постоянной угловой скорости при перемещении, ω = const.
В этом случае находят применения такие характеристики, как:
- период обращения – T, это время, необходимое для полного оборота точки при круговом движении;
- частота обращения – ν, это полное количество оборотов, которое совершает точка по круговой траектории за единичный временной интервал.
Интересно. По известным данным, Юпитер обращается вокруг Солнца за 12 лет. Когда Земля за это время делает вокруг Солнца почти 12 оборотов. Точное значение периода обращения круглого гиганта – 11,86 земных лет.
Управление асинхронным двигателем
- Способы подключения асинхронного электродвигателя к сети питания:
- прямое подключение к сети питания
- подключение от устройства плавного пуска
- подключение от преобразователя частоты
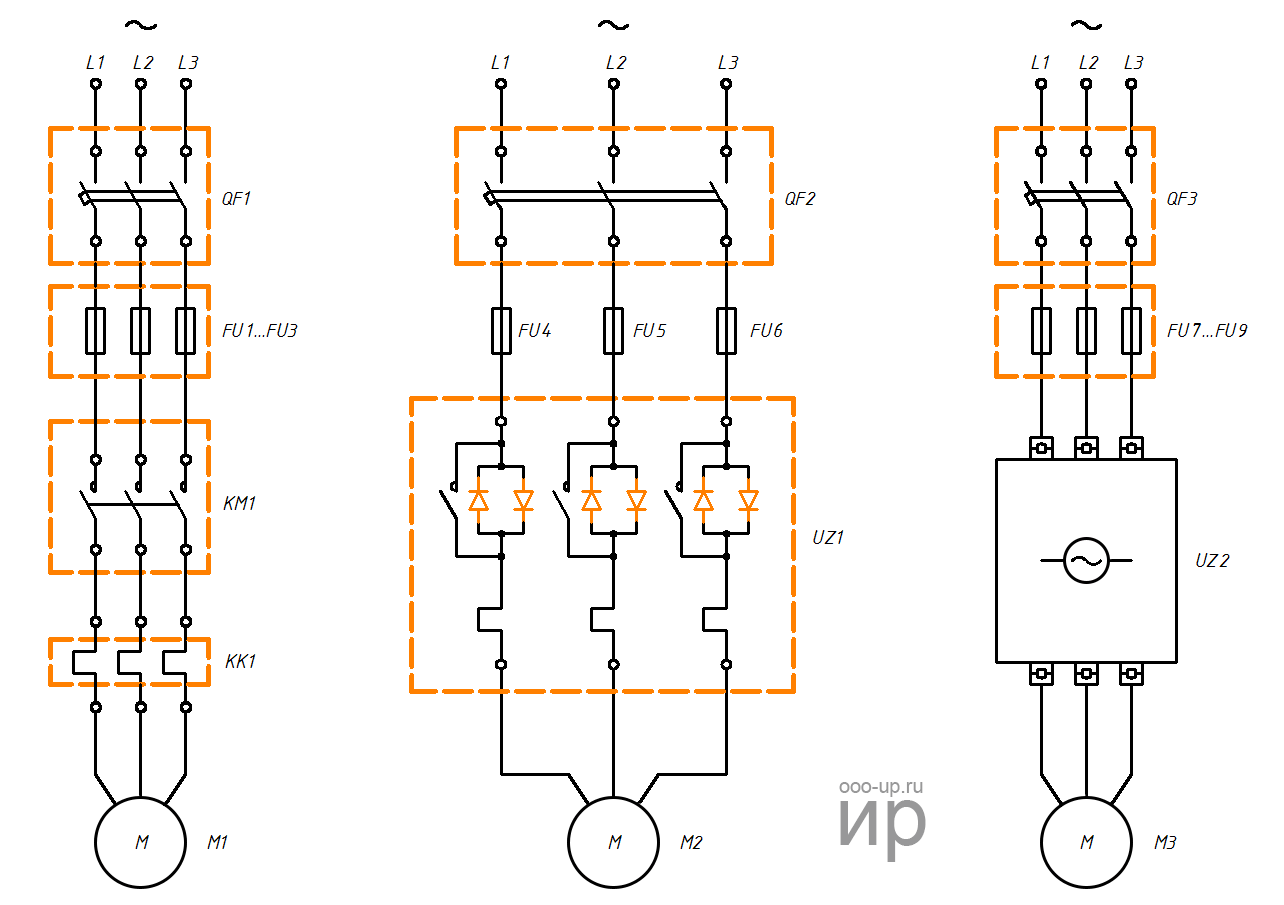
Варианты подключения асинхронного электродвигателя с помощью магнитного пускателя (слева), устройства плавного пуска (посеридине) и частотного преобразователя (справа). Схемы представлены в упрощенном виде. FU1-FU9 — плавкие предохранители, KK1 — тепловое реле, KM1 — магнитный пускатель, L1-L3 — контакты для подключения к сети трехфазного переменного тока, M1-M3 — асинхронные электродвигатели, QF1-QF3 — автоматические выключатели, UZ1 — устройство плавного пуска, UZ2 — преобразователь частоты
Прямое подключение к сети питания
Использование магнитных пускателей позволяет управлять асинхронными электродвигателями путем непосредственного подключения двигателя к сети переменного тока.
С помощью магнитных пускателей можно реализовать схему:
- нереверсивного пуска: пуск и остановка;
- реверсивного пуска: пуск, остановка и реверс.
Использование теплового реле позволяет осуществить защиту электродвигателя от величин тока намного превышающих номинальное значение.
Реверсивная схема
Недостатком прямой коммутации обмоток асинхронного электродвигателя с сетью является наличие больших пусковых токов, во время запуска электродвигателя.
В задачах, где не требуется регулировка скорости электродвигателя во время работы для уменьшения пусковых токов используется устройство плавного пуска.