Описание и назначение
Датчик ультразвука — техническое устройство, которое состоит из нескольких основных частей:
Излучатель
Наиболее распространены два вида излучателей: магнитострикционный и пьезоэлектрический.
Магнитострикционный — ультразвуковые колебания возникают при изменении линейных размеров ферромагнетика в переменном магнитном поле.
Достоинства:
- надежность — не менее 10 000 часов непрерывной работы;
- коэффициент полезного действия 80%.
Недостатки:
- сложная конструкция;
- необходимо водяное охлаждение.
Пьезоэлектрический – ультразвуковые волны возникают при изменении линейных размеров диэлектрика, выполненного в виде мембраны, в переменном электрическом поле.
Достоинства:
- простота конструкции;
- получение ультразвука широкого частотного диапазона;
- незначительные размеры.
Недостатки:
- низкая мощность излучения.
- В ультразвуковых датчиках используются в основном пьезоэлектрические излучатели.
Приемник
Пьезоэлектрический эффект имеет обратную сторону: ультразвук, попадая на пьезоэлемент, вызывают в нем колебательные движения, в результате которых возникает электрический ток. На этом принципе работают датчики ультразвукового излучения: возникновение тока в электрической цепи говорит о появлении объекта перед прибором.
По конструкции приемо-передающей системы выделяют два типа датчиков:
с одной головкой

В данной схеме передатчик и приемник — единый элемент. Мембрана, излучив ультразвук, принимает отраженный сигнал и формирует электрический сигнал. Это упрощает конструкцию, уменьшает размер. Однако есть недостаток. Мембрана после излучения не может сразу перейти к приему – необходимо время, чтобы колебания погасли. Этот период получил наименование «мертвое время». Расстояние до приемника, ближе которого отраженный объектом сигнал будет попадать на мембрану в мертвое время, называется слепой зоной. На таком расстоянии прибор не фиксирует сигнал, и объект не обнаружиться. С этим явлением борются. При помощи настроек и специальных режимов работы удается уменьшить слепую зону в 2 раза, но полностью устранить ее невозможно.
с двумя головками
Назначение датчика ультразвука — фиксация появления объектов в зоне действия, измерение расстояния до них, подсчет перемещающихся в зоне обзора предметов, определения уровня сыпучих грузов и жидкостей. При выполнении этих задач он может работать в темноте, в условиях задымленности, запыленности, повышенной влажности, высоких и низких температур. Прибор нечувствителен к звуковым сигналам слышимого диапазона. При необходимости легко регулируется на другие измерительные диапазоны.

Схема принципиальная УЗ датчика

При надетой перемычке датчик передает информацию через последовательный порт, программу для Arduino позволяющую использовать US-100 в данном режиме, можно взять здесь .
Полезное: Ограничитель импульсных перенапряжений и схема установки разрядника

В этом режиме датчик потребляет 2,5 мА при напряжении 5 В и 3,25 мА при 3,3 В.

При снятой перемычке логика работы US-100 ничем не отличается от таковой у HC-SR04 . Как показал опыт автора в данном случае нельзя подключать датчик к 0 и 1 портам Arduino.











В этом режиме датчик потребляет 2,4 мА при 5 В и 1,8 мА при 3,3 В.

Датчик US-100 корректно измеряет расстояние до твердой поверхности. При облучении ультразвуком ворсистой поверхности, рассматриваемый датчик завышает расстояние до препятствия, а в непосредственной близости выдает, что расстояние превышает радиус действия датчика. В целом датчик существенно превосходит HC-SR04 по точности измерения расстояния, кроме этого US-100 может передавать данные по последовательному интерфейсу, имеет более широкий диапазон напряжений питания. Все это по субъективному мнению автора оправдывает заметно более высокую стоимость US-100 по сравнению с HC-SR04.
Ультразвуковой датчик HC-SR04
Ультразвуковой датчик HC-SR04 — Ultrasonic Ranging Module HC — SR04 — Ultrasonic Sensor Distance Measuring Module — Sonar
Ультразвуковой дальномер HC SR04 самый известный датчик для применения в Arduino, Raspberry
Pi, ESP8266 и ESP32 модулях. Позволяет измерять расстояние до объекта в диапазоне от 2 до 400 (180) см. Например, если вы хотите собрать робота, который объезжает преграды, то данный дальномер прекрасно подойдет для ваших задач. Датчик имеет небольшие габариты и простой интерфейс. Рис. 4 Внешний вид ультразвукового датчика (сонара, ультразвукового сенсора, ультразвукового модуля) HC-SR04
Работа ультразвукового уровнемера
Ультразвуковой датчик уровня устанавливается на верхнюю часть резервуара и передает импульс вниз. Этот импульс, движущийся со скоростью звука, отражается обратно в передатчик от поверхности жидкости. Передатчик измеряет временную задержку между переданным и принятым эхо-сигналом, а бортовой процессор устройства вычисляет расстояние до поверхности жидкости.
Ультразвуковой датчик уровня выполняет расчеты для преобразования расстояния прохождения волны в меру уровня в резервуаре. Промежуток времени между запуском звуковой очереди и получением обратного эха, прямо пропорционален расстоянию между датчиком и жидкостью в сосуде.
Частотный диапазон ультразвукового уровнемера находится в диапазоне 15–200 кГц. Низкочастотные приборы используются для более сложных применений, таких как большие расстояния и измерения уровня твердого тела, а высокочастотные — для более коротких измерений уровня жидкости.

Для практического применения ультразвукового датчика уровня, необходимо учитывать ряд факторов.
Вот несколько ключевых моментов:
- Скорость звука через среду (обычно воздух), изменяется в зависимости от температуры. Преобразователь может иметь датчик температуры для компенсации изменений рабочей температуры, которые изменяют скорость звука и, следовательно, расчет расстояния, определяющий точное измерение уровня.
- Наличие пены/пыли на поверхности жидкости может выступать в качестве звукопоглощающего материала. В некоторых случаях поглощение может быть достаточным, чтобы исключить использование ультразвукового метода. Для повышения производительности в тех случаях, когда пена/пыль или другие факторы влияют на перемещение волны к поверхности жидкости и от нее, некоторые модели могут иметь направляющую луча, прикрепленную к преобразователю.
- Экстремальная турбулентность жидкости может вызвать колебания в показаниях прибора. Использование регулировки демпфирования в ультразвуковом датчике уровня или задержки отклика, может помочь преодолеть эту проблему. Трансивер обеспечивает демпфирование для управления максимальной скоростью изменения отображаемого уровня материала и флуктуацией выходного сигнала. Демпфирование замедляет скорость отклика дисплея, особенно когда жидкие поверхности находятся в состоянии перемешивания.
Принцип работы ультразвукового датчика расстояния
Ультразвуковой-датчик расстояния измеряет дистанцию, которая отделяет его от препятствия перед ним, с помощью звуковых волн, неслышимых для людей (с частотой более 18 кГц). Датчик издает звук, а затем прослушивает его возвращение, вызванное отскоком от препятствия. Время, затрачиваемое звуком на возвращение, дает информацию об его расстоянии от устройства.
Ультразвуковой датчик расстояния имеет два взаимосвязанных устройства: передатчик и приемник. Передатчик генерирует высокочастотные звуковые волны, а приемник прослушивает эхо, возникающее в результате отражения этих волн от препятствия. Датчик измеряет время, прошедшее с момента генерации сигнала, до получения его отражения. Затем время преобразуется в стандартные единицы расстояния, такие как метры и сантиметры. Длительность импульса пропорциональна расстоянию, пройденному звуком, а диапазон частот звука зависит от конкретного датчика. Например, промышленные ультразвуковые датчики используют частоту от 25 до 500 кГц.
Частота работы устройства обратно пропорциональна заданному диапазону расстояний. Звуковая волна с частотой 50 кГц может обнаруживать объект на расстоянии 10 м и более, а волна с частотой 200 кГц ограничивает максимальное расстояние обнаруживаемых объектов до 1 м., следовательно, волны с более низкими частотами могут использоваться для обнаружения объектов, расположенных на больших расстояниях, а волны с более высокими частотами могут использоваться для обнаружения объектов, расположенных ближе. Типичный дешевый ультразвуковой датчик работает в диапазоне от 30 до 50 кГц.
Преимущества и недостатки ультразвуковых датчиков
Преимущества:
- ультразвуковые передатчики легко устанавливаются на поверхности или на резервуары, содержащие жидкость;
- настройка проста, и эти устройства с возможностью бортового программирования могут быть сконфигурированы за считанные минуты;
- поскольку нет контакта со средой и движущихся частей, устройства практически не требуют технического обслуживания;
- поскольку устройство бесконтактно, измерение уровня не зависит от изменений плотности жидкости;
- изменения температуры изменят скорость ультразвукового импульса, но встроенный температурный датчик автоматически исправит погрешности при вычислении;
- изменения технологического давления не влияют на измерение.
Недостатки:
- ультразвуковые датчики рассчитаны на то, что импульс не будет затронут во время его полета, поэтому следует избегать жидкостей, образующих тяжелые газы или слои пара;
- поскольку для прохождения импульса требуется воздух, применение ультразвукового-датчика в вакууме невозможно;
- конструкционные материалы прибора обычно ограничивают температуру работы, примерно до 70 C;
- приборы можно использовать на силосохранилищах, содержащих сухие продукты, такие как гранулы, зерна или порошки, но необходимо учитывать такие факторы, как угол поверхности, запыленность и расстояние.
Подключение к Arduino
Если вы планируете использовать ультразвуковой дальномер HC-SR04 с Arduino вы можете воспользоваться существующими библиотеками:
- Ultrasonic — самая популярная библиотека для HC-SR04.
- NewPing — отличается большей точностью и скоростью работы.
- Ультразвуковой дальномер URM37
Распиновка:
- Vcc — положительный вывод питания
- TRIG — вход TRIG
- ECHO — выход ECHO
- GND — ноль питания
На выводы питания подается постоянное напряжение 5 В, потребляемый ток в рабочем режиме около 15 мА.
Вход TRIG подключается к любому выводу микроконтроллера. На этот вывод нужно подавать импульсный цифровой сигнал длительностью 10 мкс. По сигналу на входе TRIG датчик посылает ультразвуковые импульсы.
После приема отраженного сигнала, датчик формирует на выводе ECHO импульсный сигнал, длительность которого пропорционально расстоянию до преграды.
Контакты датчика можно соединить с макетной платой или Arduinoпроводами «мама-папа». А с Troyka Shield через провода «мама-мама».










Гаражный парктроник
Этот дальномер может служить прекрасным датчиком для робота, благодаря которому он сможет определять расстояния до объектов, объезжать препятствия, или строить карту помещения. Его можно также использовать в качестве датчика для сигнализации, срабатывающего при приближении объектов.
Принцип действия
Ультразвуковой дальномер определяет расстояние до объектов точно так же, как это делают дельфины или летучие мыши. Он генерирует звуковые импульсы на частоте 40 кГц и слушает эхо. По времени распространения звуковой волны туда и обратно можно однозначно определить расстояние до объекта.
В отличие от инфракрасных дальномеров, на показания ультразвукового дальномера не влияют засветки от солнца или цвет объекта. Но могут возникнуть трудности с определением расстояния до пушистых или очень тонких предметов. Поэтому высокотехнологичную мышеловку выполнить на нём будет затруднительно.
При отражении звука от препятствия мы слышим эхо. Летучая мышь использует отражение ультразвуковых волн для полётов в темноте и для охоты на насекомых. По такому же принципу работает эхолот, с помощью которого измеряется глубина воды под днищем корабля или поиск рыбы.
Принцип передачи и приема ультразвуковой энергии лежит в основе многих очень популярных ультразвуковых датчиков и детекторов скорости. Ультразвуковые волны являются механическими акустическими волнами, частота которых лежит за пределами слышимости человеческого уха — более 20 кГц. Однако сигналы этих частот воспринимаются некоторыми животными: собаками, кошками, грызунами и насекомыми. А некоторые виды млекопитающих, таких как летучие мыши и дельфины, общаются друг с другом ультразвуковыми сигналами.
УЛЬТРАЗВУКОВОЙ ДАТЧИК Lego Mindstorm EV 3. ЗРИ В КОРЕНЬ
Технические спецификации и особенности продукта:
- Измерение расстояния в диапазоне от 1 до 250 см
- Точность измерения до +/- 1 см
- Передняя подсветка в виде красного кольца горит постоянно при передаче сигнала и мигает при прослушивании эфира
- Если ультразвуковой сигнал распознан, датчик возвращает логическое значение «Истина»
- Автоматическая идентификация производится программным обеспечением микрокомпьютера EV3
Рис. 1 Ультразвуковой датчик Lego Mindstorm EV 3 (стоимость вместе с внутренним микроконтроллером и микросхемами усиления сигнала $50, при себестоимости $5)
Рис. 2 Схема ультразвукового датчика Lego Mindstorm EV 3 (ultrasonic sensor hardware schematics) построена на микроконтроллере STM8S103F3
- Введение в микроконтроллеры stm8
- Микроконтроллер STM8S103F3
- Схема центрального микроконтроллера LEGO MINDSTORMS EV3 programmable brick main hardware schematics
Рис. 3 Ультразвуковые излучатель AW8T40 и приемник AW8R40 ультразвукового датчика Lego Mindstorm EV 3
Другие сферы применения
Ультразвуковые сенсоры применяют в различных областях:
- Для контроля физико-химических характеристик веществ. Принцип действия основан на сравнения скорости звука в проверяемом веществе с эталонным – расхождение указывает на изменения в веществе.
- Для контроля расхода жидких веществ в трубопроводах. Принцип действия основывается на сравнении скорости ультразвуковых колебаний по направлению потока и против него. Метод не требует помещение датчика внутрь трубопровода — сенсор крепится с наружной стороны.
-
Для определения уровней жидких или сыпучих материалов. Принцип действия основан на отражении ультразвука, посылаемого датчиком, от границы раздела «газ – жидкий или сыпучий материал». При понижении уровня время прохождения колебаний меняется, и прибор сигнализирует об этом.
- Для охраны помещений. Принципов действия несколько:
- охранный датчик испускает ультразвуковое излучение. При появлении в зоне обнаружение объекта отраженный сигнал принимается датчиком. Далее он действует по выбранному алгоритму: включает сирену, подает сигнал на пульт охраны и т.д.;
- сигнал охранного датчика попадает на приемник, расположенный на некотором расстоянии. При прохождении объекта между приемником и излучателем сигнал прерывается, и сенсор действует по приведенному алгоритму.
Для надежности обычно применяют несколько ультразвуковых охранных датчиков, работающих на разных принципах.
Пожарная безопасность. Ультразвуковой пожарный извещатель действует по тому же принципу, что и охранный. Реагирует не на объект, а на движение нагретого огнем воздуха. Отличается высокой чувствительностью. Измерители температуры газов и пожарные сигнализаторы, основанные на изменении скорости распространения при изменении температуры среды или появления дыма.
Ультразвуковой контроль качества материалов и изделий. Принцип действия основан на отличии скорости звука в разных средах и отражении ультразвука от границы сред. Обнаруживает точное расположение внутренних дефектов на глубине нескольких метров.
Медицина. Проведение ультразвукового исследования для диагностики внутренних патологий. Принцип работы датчика основан том, что скорость прохождения ультразвуковых волн в тканях человека. Отраженный сигнал меняет длину волны в различных тканях организма. Визуализация сигнала на экране прибора дает возможность увидеть строение внутренних органов человека.
Источник
Технические характеристики
https://www.yourmestudio.com/rcw-0002-ultrasonic-ranging-module-p717.html
- Напряжение питание: 5 В
- Потребление в режиме тишины: 2 мА
- Потребление при работе: 15 мА
- Диапазон расстояний: 2–400 см
- Эффективный угол наблюдения: 15°
- Рабочий угол наблюдения: 30°
Описание продукта:
ТК T 40-16 т/r 1
- (Tc): piezoceramics Ультразвуковой датчик
- (T): Категория t-общность
- (40): Центральная частота (кгц)
- (16): наружный диаметр? (мм)
- (T): использование режим: излучатель; r-приемник; tr-совместимость излучатель и приемник
- (1): ID — 1,2, 3…
Тестирования цепи
- 1 синусоидальный генератор 1 охватил сигнала Генератор
- 2 cymometer 2 Частотомер
- 3 стандартных динамик 3 вольтметр
- 4 Получить модель датчика 4 излучают модель датчика
- 5 осциллографа 5 Стандартный микрофон
- 6 аудио частотные характеристики Дисплей прибора
Производительность продукта1). Номинальная частота (кГц): 40 кГц 2). излучать звук pressureat10V (= 0.02Mpa):? 117dB 3). Прием Чувствительность приемника at40KHz (дБ = v/ubar):?-65dB 4). Электростатический потенциал at1KHz, <1 В (PF): 2000 +/-30% 5). Диапазон обнаружения (м): 0.2 ~ 20 6).-6дБ угол направления: 80o 7). Обшивка материал: алюминий 8). Обшивка ЦВЕТ: серебристый










УСТРОЙСТВО
Пьезоэлемент
RCW-0012
Ультразвуковой датчик
Ultrasonic Ranging Module HC — SR04
РАЗРАБОТКА РОБОТА НА ОСНОВЕ УЛЬТРАЗВУКОВОГО ДАЛЬНОМЕРА
Урок 19. Работа с ультразвуковым датчиком расстояния HC-SR04 в BASCOM-AVR
Radar проекта
Ультразвуковой дальномер HC-SR04 подключение к Arduino
HC-SR04 Дальномер ультразвуковой
Ультразвуковой датчик HC-SR04 – дальномер на микроконтроллере
https://www.alibaba.com/product-detail/HC-SR04-Ultrasonic-Module-Distance-Measuring_1898465949.html
https://www.elecfreaks.com/store/download/product/Sensor/HC-SR04/HC-SR04_Ultrasonic_Module_User_Guide.pdf
https://arduino-kit.ru/userfiles/image/HC-SR04%20_.pdf
https://robocraft.ru/blog/arduino/770.html
Ультразвуковой датчик измерения расстояния HC-SR04
The Application of PWM Capture (Data Acquisition) and Ultrasonic Sensors
Pengetahuan Dasar Таймер Untuk Pengukuran Jarak Dengan Ультразвуковой
Запуск сервопривода с помощью датчика расстояния HC-SR04 и Arduino
https://robocraft.ru/blog/electronics/772.html
Raspi-отстойника в октябре 2014 Embedded Выпуск LinuxJournal
https://www.arduino.cc/en/Tutorial/Ping
Простой искатель ультразвуковой диапазон с помощью HC-SR04
Датчик Препятствие с помощью Arduino и HCSR04
Как проверить DYP-ME007 Ультразвуковой дальномер с использованием NE555 и мультиметра
https://macduino.blogspot.ru/2013/11/HC-SR04-part1.html










Сонар для инвалидов по зрению
https://hackaday.io/project/5903/logs
https://h ackaday.io/project/5903-sonar-for-the-visually-impaired/log/18329-ultrasonic-module-virtual-teardown
https://www.maxbotix.com/performance.htm
https://amperka.ru/product/ultrasonic-urm37
https://image.dfrobot.com/image/data/SEN0002/URM04V2.0Mannual1.1.pdf
https://people.ece.cornell.edu/land/courses/ece4760/FinalProjects/s2012/xz227_gm348/xz227_gm348/URM3.2_Mannual_Rev2.pdf
RCW-0012 Ультразвуковой Модуль Расстояние Измерительный Преобразователь Тест Модуля Индикации
https://www.farnell.com/datasheets/81163.pdf?_ga=1.169892256.1853603956.1478607467
https://chinaultrasound.en.alibaba.com/product/60268805778-800581237/40Khz_TCT40_16R_T_Air_Ultrasonic_Ceramic_Transducer_Ultrasonic_Sensor.html
https://ezoneda.company.weiku.com/item/SRF05-five-Pin-Ultrasonic-ranging-module-Ultrasonic-sensor-15404413.html
Примеры
Ультразвуковой датчик Lego Mindstorm EV 3
Входит в робототехнический конструктор Lego Mindstorm EV 3. Основная функция — измерение расстояния до объектов, находящихся в поле зрения сенсора.
Выполнен по схеме с двумя головками. Одна – пьезоэлектрический преобразователь-излучатель AW8T40, другая — пьезоэлектрический преобразователь-приемник AW8R40. Головки размещены в общем корпусе вместе с микроконтроллером и микросхемами усиления сигнала. Датчик через кабель подключается к центральному микрокомпьютеру EV 3.
Характеристики:
- Частота излучения – 40000 герц.
- Дистанция обнаружения — до 255 см.
- Слепая зона — 3 см.
- Точность измерения — +/- 1 см.
- Вес – 0,05 кг.
Лучше обнаруживает объекты с гладкой, хорошо отражающей звуковые волны поверхностью. Объекты, покрытые мягкой тканью, могут не обнаруживаться датчиком. Затруднено фиксирование объектов сферической формы, либо имеющих наклонные поверхности.

Работает в двух режимах:
- режим определения расстояния;
- режим обнаружение другого ультразвукового излучателя.
Датчик сконструирован для использования в наборе Lego Mindstorm EV 3 и автоматически определяется программным обеспечением микрокомпьютера. Устанавливается на роботах, собранных из элементов набора.
Ультразвуковой датчик HC-SR04
Датчик также выполнен по двухголовочной схеме и состоит из пьезоэлектрического преобразователя-излучателя TCT40-16T, и пьезоэлектрического преобразователя-приемника TCT40-16R. Они размещены на плате, размером 45х25 мм, с обратной стороны которой смонтированы микросхемы и другие элементы. Внизу платы выведены четыре контакта: 2 – питания, 2 – цифровые вход и выход.
Характеристики:
- Напряжением — 5 В.
- Частота ультразвука — 40 кГц
- Дистанция обнаружения — до 400 см.
- Слепая зона – 2 см.
- Минимальный разрешение – 0,3 см.
- Эффективный угол наблюдения — 15°.
- Вес- 8,3 гр.

Обычно он интегрируется с аппаратной платформой Arduino, но может подключаться и к другим микроконтроллерам. Благодаря открытой архитектуре и программному коду Arduino, HC-SR04 широко используется в любительских и профессиональных проектах: конструирование робототехники, создание измерительных приборов и сторожевых систем и т.п.
Работает только в активном режиме – не определяет посторонние источники ультразвука.
Востребованности прибора способствует цена – около 100 рублей.
3Получение дистанции до объекта с датчика HC-SR04
Теперь напишем скетч, определяющий расстояние до препятствия и выводящий его в последовательный порт. Сначала задаём номера выводов TRIG и ECHO – это 12 и 11 пины. Затем объявляем триггер как выход, а эхо – как вход. Инициализируем последовательный порт на скорости 9600 бод. В каждом повторении цикла loop() считываем дистанцию и выводим в порт.










const int trigPin = 12; const int echoPin = 11;void setup() { pinMode(trigPin, OUTPUT); // триггер — выходной пин pinMode(echoPin, INPUT); // эхо — входной digitalWrite(trigPin, LOW); Serial.begin(9600); // инициализация послед. порта}void loop() { long distance = getDistance(); // получаем дистанцию с датчика Serial.println(distance); // выводим в последовательный порт delay(100);} // Определение дистанции до объекта в смlong getDistance() { long distacne_cm = getEchoTiming() * 1.7 * 0.01; return distacne_cm;} // Определение времени задержкиlong getEchoTiming() { digitalWrite(trigPin, HIGH); // генерируем 10 мкс импульс запуска delayMicroseconds(10); digitalWrite(trigPin, LOW); // определение на пине echoPin длительности уровня HIGH, мкс: long duration = pulseIn(echoPin, HIGH); return duration;} Функция getEchoTiming() генерирует импульс запуска. Она как раз создаёт тот 10-микросекундный импульс, который является триггером для начала излучения дальномером звукового пакета в пространство. Далее она запоминает время от начала передачи звуковой волны до прихода эха.
Функция getDistance() рассчитывает дистанцию до объекта. Из школьного курса физики мы помним, что расстояние равно скорость умножить на время: S = V×t Скорость звука в воздухе 340 м/сек, время в микросекундах мы знаем (переменная duration). Чтобы получить время duration в секундах, нужно разделить его на 1 000 000. Так как звук проходит двойное расстояние – до объекта и обратно – нужно ещё разделить результат пополам. Вот и получается, что расстояние до объекта S = 34000 см/сек × duration / 1 000 000 сек / 2 = 1,7 см/сек / 100, что мы и написали в скетче.
Операцию умножения микроконтроллер выполняет быстрее, чем операцию деления, поэтому :100 я заменил на эквивалентное ×0,01.
Получение ультразвука
Ультразвук, используемый в медицине, основан на пьезоэлектрическом воздействии. Так называется возможность кристаллов и керамики искажаться при воздействии на них электрического напряжения. Когда это происходит, возникают УЗ-волны. Данный эффект имеет обратную связь, когда пьезоэлектрический кристалл вызывает напряжение, которое можно замерить.
Когда образовывается волна ультразвука, она начинает свое движение в соединяющей среде, позволяющей увеличить проходимость между УЗ и предметом анализа. В медицинских обследованиях данным сопроводителем является УЗ-гель.
Применение сенсоров ультразвукового излучения в робототехнике
Главная задача, решаемая в робототехнике с помощью датчиков этого вида — ориентирование робота на местности, предотвращение столкновений и обеспечение обхода препятствий.
Достоинства систем ориентации, построенных на ультразвуковых датчиках:
- цена;
- проста в изготовлении, так как монтируется из легкодоступных элементов;
- при интегрировании в роботизированные устройства не требуется менять схему управления робота;
- универсальность;
- нечувствительность к неблагоприятным факторам окружающей среды: задымленность, запыленность, отсутствие света, высокая влажность.
Учитывая незначительную дистанцию действия сенсоров в воздушной среде, их применяют в пространствах ограниченного объема искусственного или естественного происхождения, с твердыми и ровными поверхностями. Это обеспечивает получение устойчивого эхо-сигнала. В таких условиях информация ультразвукового дальномера объективна. Для кругового обзора необходимо увеличение количества датчиков. Определение расстояние до преграды в движении, остановка и объезд достигается программными средствами.
Ультразвуковые сенсорные системы широко применяются в подводных роботах, являясь основными средствами контроля окружающего пространства. Здесь в качестве гидроакустических преобразователей используют магнитострикционные излучатели, обладающие большой акустической мощностью.
Общая информация об ультразвуковых датчиках
Прежде чем разбирать принцип работы конкретных устройств, стоит рассмотреть все аспекты работы ультразвукового датчика.
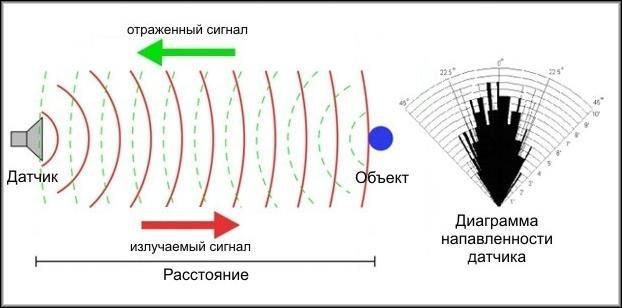
Принцип работы
Работа ультразвукового датчика заключается в том, что передатчик посылает ультразвуковую волну с частотой от нескольких десятков до нескольких сотен герц, направленную к определенному объекту. Когда волна встречает объект, она отражается от него и возвращается, попадая в приёмник. По времени, в течение которого волна преодолела путь, можно определить расстояние от объекта. В зависимости от типа устройства, это расстояние может варьироваться от нескольких сантиметров до 10 метров.
Генерируемое отражение принимается и преобразуется в электрический сигнал пьезоэлектрическим преобразователем. Прибор измеряет задержку между излучаемым ультразвуковым импульсом и полученным отражением, вычисляя расстояние до объекта, используя значение скорости звука. При комнатной температуре скорость распространения звука в воздухе составляет около 344 м/с.

Самоочищение ультразвукового датчика
В настоящее время, благодаря использованию передовых технологий, ультразвуковое устройство может действовать как датчик приближения, и как аналоговый измеритель расстояния. Большим преимуществом таких детекторов является то, что на их работу не влияют внешние условия окружающей среды, такие как туман, пыль, загрязнение воздуха. Кроме того, датчики также работают с прозрачными объектами, которые создают сильные отражения. Уникальная способность УЗ-устройства, заключается в том, что у них есть функция самоочищения, которой нет ни у каких других датчиков. Это связано с тем, что при передаче ультразвуковых волн, прибор сам настраивается на вибрацию (под воздействием высокочастотных звуков) и таким образом очищается от пыли и других загрязнений.

Диапазон измерения
Точность работы в первую очередь обусловлена диапазоном измерения. Прибор определяет интервал, при этом учитывая все значения, для измерения которых данное устройство предназначено. Основной принцип заключается в том, что измерения всегда более точны в среднем диапазоне, и менее точны ближе к предельным значениям. Диапазон измерения может быть соответствующим образом адаптирован к вашим потребностям. Современные устройства, как правило, имеют несколько различных диапазонов. Они указаны в спецификации продукта. Таким образом, вы можете выбрать нужный датчик для требуемых замеров.
Факторы, влияющие на диапазон измерения
Диапазон измерения УЗ-датчика зависит от свойств поверхности и угла установки объекта. Наибольший диапазон измерения можно получить для объектов с плоскими поверхностями, расположенными под прямым углом к оси датчика. Очень маленькие объекты или предметы, отражающие звук, частично сокращают дальность обнаружения. Объекты с гладкими поверхностями должны быть расположены как можно ближе к датчику, под углом 90°. Поверхности с неровной текстурой обеспечивают больший допуск к отклонению угла объектов.
Следует также учитывать воздействие окружающей среды. Наибольшее влияние на точность ультразвуковых датчиков оказывает температура воздуха. Относительная влажность и барометрическое давление также должны быть учтены.
Материалы, которые может обнаружить ультразвуковой датчик
УЗ-устройства обнаруживают практически все промышленные материалы из дерева, металла или пластика, независимо от их формы и цвета. Объекты могут быть твердыми, жидкими или порошкообразными. Единственным требованием является беспрепятственное отражение звуковых волн в сторону датчика. Однако некоторые объекты могут уменьшить рабочий диапазон устройства. Это объекты с большими, гладкими и наклонными поверхностями, либо с пористой текстурой, например, войлок, шерсть или строительная пена.

Названия выводов и ультразвуковых излучателей модуля
- Vcc — положительный контакт питания.
- Trig — цифровой вход. Для запуска измерения необходимо подать на этот вход импульс (логическую единицу) длительностью 10 мкс. Следующий импульс рекомендуется подавать не ранее чем через 50 мс. что связано со временем обработки первого импульса.
- Echo — цифровой выход. После обработки отраженного сигнала, на этот выход будет подан импульс (логическая единица), длительностью пропорциональной расстоянию до объекта.
- GND — отрицательный контакт питания (земля).
- Левый ультразвуковой излучатель (маркирован буквой Т — transmiter) это передатчик ультразвукового сигнала, правый ультразвуковой излучатель (маркирован буквой R — resiver) это приемник отраженного от объекта ультразвукового сигнала (эха).